
It is entirely natural for sighted people to see what they are constructing on screen. Designers with a vision impairment, on the other hand, are not only required to have a higher level of abstraction and concentration, they simply cannot recognise when they have made a mistake, when a model does not correspond to the plan or even when it becomes unprintable due to an error in the construction process.
Sending every intermediate step to the 3D printer for checking, in order to keep an eye on progress is impractical for a variety of reasons: the time involved cannot be justified, the production costs multiply and the resulting waste is ecologically unacceptable.
At school, visual inspection by classmates or educational or technical staff is the only way out in most cases. However, it must be admitted that this cannot be called genuine participation throughout the whole process. We have already identified this as a challenge to be overcome in the operation and maintenance of the hardware. However, we have already been able to test a solution for interim feedback during the construction process.
In the following article, we would like to present a solution approach and then draw conclusions from our experiences gained in the various learner activities as to how far it can also be fruitfully used in other settings.
5.1 The Haptic Device and SensAble
Unfortunately, conventional assistive technologies are not suitable for providing feedback during construction, as they only allow two-dimensional representations. The widely used braille displays are, strictly speaking, actually only one-dimensional output devices. The representation of three-dimensional objects must therefore be completely rethought, while also taking into account the above-mentioned aspects of immediate provision/availability, cost reduction and ecological compatibility.
The solution lies in the use of haptic devices, with the help of which users are given a virtual impression that they are feeling the contours of an object. They hold a kind of joystick in their hand that provides just the right amount of counterpressure by means of small electric motors when the user’s movements reach the edges of the object. Instead of actual touch, pressure is used to suggest to the sense of touch that the hand is feeling an object.
As part of the SensAble study, a system was developed at Philipps-Universität Marburg to make these haptic devices (which were originally invented to control video games) usable for modelling processes. Behind the front-end described above is software that makes objects created and rendered in OpenSCAD tangible in various ways:
- By means of a function similar to magnetism, the user’s hand is drawn onto the virtual surface of the object. In a free mode, they can now move the joystick along the surfaces and edges of the object and thus explore it in its three-dimensionality. The small electric motors react in real time and, via counterpressure, always simulate the feeling of touch when one hits the surface.
- The guided mode makes it possible to let the hand be guided around the object. Here you can choose between the three axes and thus gain an initial overview or explore edges in greater detail.
- The movements are supported by acoustic signals that provide information, for example about the distance to the object, changes in direction when touching it or distinctive places.
In a user study involving participants with a vision impairment, the novel “guided mode” improved the identification of 3D models by 34 percent compared to the standard mode. Furthermore, 3D models created with the complete audio-haptic system exhibited significantly fewer errors and received an average rating that is 28 percent higher than models created using only the standard mode, and 84 percent higher than models without audio-haptic preview. (cf. https://dl.acm.org/doi/abs/10.1145/3373625.3417007)
The rendering and sending to the haptic device were carried out via batch processing, so that the learners only had to execute batch files to independently load models into the virtual output of the haptic device. This allows the feedback to be self-acting, immediate and resource-efficient. Additional information and videos are available at https://www.uni-marburg.de/en/fb12/research-groups/grafikmultimedia/research/haptic_mesh_inspection
5.2 Use in Learner Activities
Even though the main focus of the four learner activities presented in the report was on the software for modelling and slicing as well as the printing hardware, obtaining intermediate feedback also became a recurring topic. As a result we decided to use the haptic device and discuss it as an optional component here.
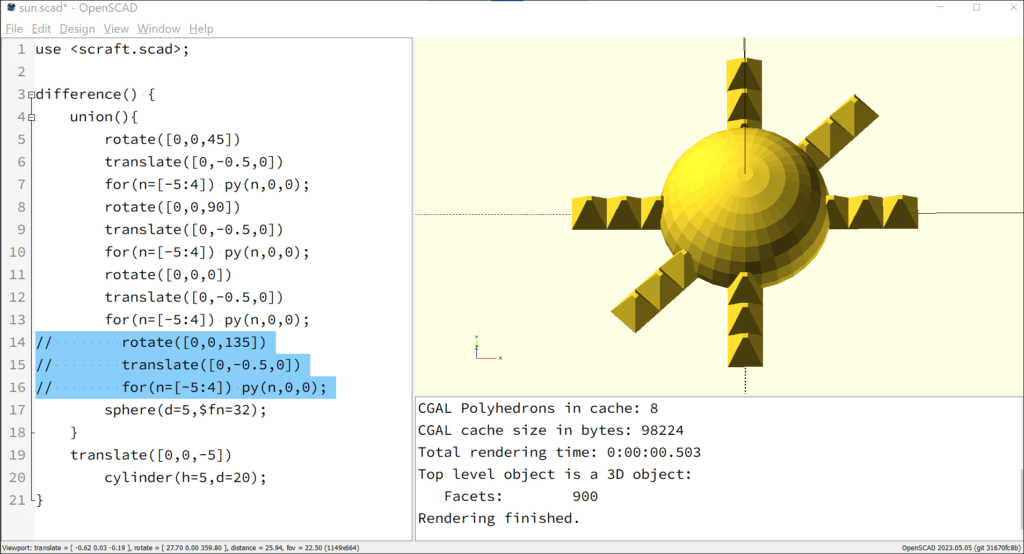
To provide an example of the opportunities it offers, let’s consider (fig 6.2.a). This example arose in a Spanish course, in which learners with a vision impairment wanted to know about the representation of the sun in the Argentinian flag. The object is the work of a learner in this group. Unfortunately, two sun rays were missing in the first draft of the model but the learner was able to notice this using the SensAble Device (this section is highlighted in the program listing for reconstruction).
Overall, the haptic feedback has proven to be very useful after a relatively short period of adaptation. It promotes an incremental working approach in the development of models, which is characteristic of programming activities in general.
Nevertheless, it has also shown that not every learner is capable of using the haptic device as a means of representation, especially when their imagination of 3D space is not fully developed. In those cases it is very important to use real printed objects to show intermediate results.
Moreover, the amount of time needed to practise using it has to be taken into consideration as well. Only projects and activities that have been assigned enough time should involve the use of haptic devices. The focus should be on acquiring modelling skills and working with real 3D objects. The virtual intermediate feedback has proven to be beneficial when there is enough time to practise with the haptic device.
In a nutshell, we would like to emphasise that the haptic device can never replace a real tangible model. It must not be used to show objects in class. Its purpose should instead be to enable designers with a vision impairment to obtain intermediate feedback during the modelling process.
